Observateur d'état
En automatique et en théorie de l'information, un observateur d'état est une extension d'un modèle représenté sous forme de représentation d'état.

Catégories :
Automatique - Robotique - Théorie de l'information
Recherche sur Google Images :
Source image : commons.wikimedia.org Cette image est un résultat de recherche de Google Image. Elle est peut-être réduite par rapport à l'originale et/ou protégée par des droits d'auteur. |
Page(s) en rapport avec ce sujet :
- (Automatique espace d'état) et 3 (TP observateur d'état)... 1 séance de TP intitulé ‘ observateur d'état'illustre une partie de ce cours... (source : campus.eseo)
- et de les amener jusqu'à la correction par retour d'état et observateur dans le cas... Le retour d ‘état. - L'observabilité. Dualité. L'observateur d'état.... (source : luno-edu)
En automatique et en théorie de l'information, un observateur d'état est une extension d'un modèle représenté sous forme de représentation d'état. Quand l'état d'un dispositif n'est pas mesurable, on construit un observateur qui sert à reconstruire l'état à partir d'un modèle du dispositif dynamique et des mesures d'autres grandeurs.
La théorie de l'observateur d'état déterministe a été introduite dans les années soixante par Luenberger pour les dispositifs linéaires. Kalman a aussi formulé un observateur en considérant un dispositif linéaire stochastique. Pour les dispositifs non-linéaires, l'observation reste un domaine où la recherche est particulièrement active, mais l'utilisation la plus commune est l'emploi d'un filtrage de Kalman étendu (EKF).
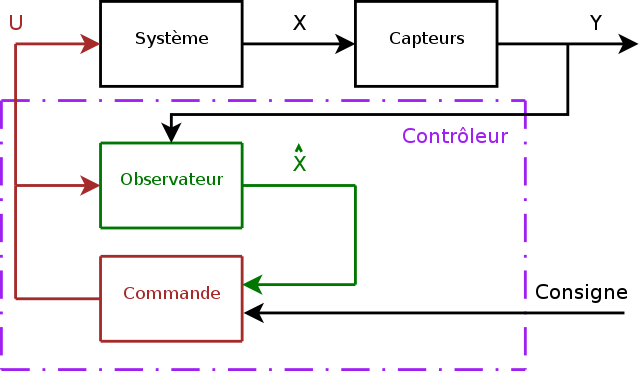
Architecture avec un observateur
On utilise la notation "chapeau" pour exprimer une estimation. Si X représente l'état réel du dispositif non mesuré,  représente l'estimation de l'état faite par l'observateur.
représente l'estimation de l'état faite par l'observateur.

L'estimation de l'état se fait en recopiant de façon virtuelle la dynamique du dispositif en prenant en compte la commande U mais également les sorties du dispositifs (les mesures) Y dans l'objectif de corriger les écarts éventuels.
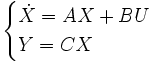
Observateur de Kalman
Soit le dispositif linéaire suivant :
Un observateur dynamique a la forme suivante :
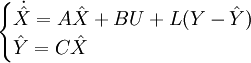
On vient corriger l'évolution de l'état grâce au modèle selon l'écart constaté entre la sortie observée et la sortie reconstruite par l'observateur :  .
.
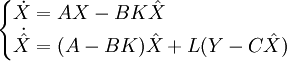
On peut réécrire l'observateur de la manière suivante :

on vérifie quoique l'observateur reconstruit l'état X selon la commande U et des mesures Y comme sur le schéma ci-dessus.
La matrice L est nommée matrice de gain et doit être choisie de façon à ce que l'erreur sur l'état converge exponentiellement vers 0, soit  . Pour cela, il suffit de choisir L telle que la matrice (A-LC) soit une matrice Hurtwitz, c'est-à-dire que ses valeurs propres soient à parties réelles négatives dans le cas continu ou possèdent un module inférieur à 1 dans le cas discret.
. Pour cela, il suffit de choisir L telle que la matrice (A-LC) soit une matrice Hurtwitz, c'est-à-dire que ses valeurs propres soient à parties réelles négatives dans le cas continu ou possèdent un module inférieur à 1 dans le cas discret.
Commande par retour d'état reconstruit par un observateur de Kalman
L'observateur linéaire de Kalman - Luenberger possède une caractéristique intéressante connue sous le nom de principe de séparation : dans le cas d'une commande linéaire par retour d'état, les travaux de synthèse de commande et de synthèse d'observateur peuvent se faire de façon indépendante. En effet, si le dispositif commandé est stable, et si l'observateur ainsi conçu est stable (i. e. les matrices A − BK et A − LC sont Hurtwitz) alors le dispositif commandé par retour de l'état reconstruit est stable.
En effet, considérons le dispositif linéaire invariant suivant, observable et commandable, pourvu d'un observateur de Kalman - Luenberger :

En réalisant un bouclage par retour d'état  , la dynamique du dispositif bouclé s'écrit alors :
, la dynamique du dispositif bouclé s'écrit alors :
On peut faire le changement de variable suivant, pour écrire l'erreur de reconstruction :
 d'où, en remplaçant,
d'où, en remplaçant, 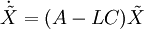
En écrivant un nouveau dispositif augmenté, constitué de l'état et de l'erreur de reconstruction, on obtient :
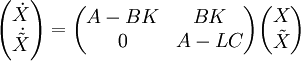
Cette matrice est triangulaire par blocs, et donc le spectre du dispositif bouclé est constitué de l'union des spectres des blocs diagonaux, c'est-à-dire l'union des spectres du dispositif d'origine commandé, et du dispositif d'origine observé. Ainsi la synthèse d'un dispositif commandé par un retour d'état reconstruit par un observateur est spécifiquement simple pour les dispositifs linéaires invariants, puisque on peut synthétiser les deux fonctions scindément.

Quelques remarques :
- Pour le placement de pôles, on a tout intérêt à ce que l'observateur soit plus rapide que le dispositif dynamique, de manière à ce qu'il puisse poursuivre le dispositif en question. Ainsi il faudra que l'abscisse spectrale de l'observateur soit plus négative que celle du dispositif commandé.
- Du fait de sa nature dynamique (intégration des signaux de mesure) l'observateur est aussi utilisé en traitement du signal pour filtrer des mesures. C'est dans ce contexte que Kalman à publié le filtre qui porte désormais son nom.
- L'abscisse spectrale ne doit pas être trop négative, pour limiter la sensibilité au bruit de l'observateur. En pratique, on utilise des valeurs comprises entre 2 et 5 fois celle de l'abscisse spectrale du dispositif commandé.
- Une commande fondée sur un retour d'état reconstruit n'est pas robuste aux erreurs de modélisation. Ce fait est assez intuitif car on passe par une approche basée modèle pour reconstruire notre état, par conséquent la précision de l'état reconstruit dépend de la pertinence du modèle utilisé.
Bibliographie
- D. G. Luenberger, Observing the state of a linear system. IEEE Transaction on Military Electronics, (8) :74-80, 1964
- R. E. Kalman and R. Bucy, New results in linear filtering and prediction. Journal of Basic Engineering (ASME), 83D :98-108, 1961
- A. Gelb, Applied Optimal Estimation. The MIT press, Massachusetts Institute of Technology, 1974
- J. P. Gauthier Deterministic observation theory and applications. Cambridge University Press, 2001, isbn 0521805937
Voir aussi
Recherche sur Amazone (livres) : |
Voir la liste des contributeurs.
La version présentée ici à été extraite depuis cette source le 14/04/2009.
Ce texte est disponible sous les termes de la licence de documentation libre GNU (GFDL).
La liste des définitions proposées en tête de page est une sélection parmi les résultats obtenus à l'aide de la commande "define:" de Google.
Cette page fait partie du projet Wikibis.
 Accueil
Accueil Recherche
Recherche Début page
Début page Contact
Contact Imprimer
Imprimer Accessibilité
Accessibilité