Commandabilité
Un dispositif est dit commandable si quel que soit x l'état à l'instant d'origine, et quel que soit x l'état à l'instant final, il existe une commande u, appliquée sur un intervalle de temps fini, qui sert à rejoindre l'état final partant de l'état d'origine.

Catégories :
Automatique - Robotique
Un dispositif est dit commandable si quel que soit x (ti) l'état à l'instant d'origine, et quel que soit x (tf) l'état à l'instant final, il existe une commande u (t) , appliquée sur un intervalle de temps fini [ti;tf], qui sert à rejoindre l'état final partant de l'état d'origine.
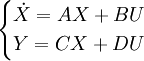
On considérera dans cet article les dispositifs linéaires invariants (SLI) définis par la représentation d'état suivante :
Dispositif diagonal
Soit un dispositif décrit par la représentation d'état 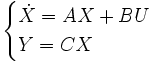 avec A une matrice diagonale. Ce dispositif est commandable si et uniquement si l'ensemble des lignes de la matrice B sont non nulles.
avec A une matrice diagonale. Ce dispositif est commandable si et uniquement si l'ensemble des lignes de la matrice B sont non nulles.
Critère de Kalman pour la commandabilité des dispositifs linéaires invariants
Dans un cas plus général, le dispositif est commandable si et uniquement si :

La matrice  est nommée la matrice de commandabilité, et ses colonnes se calculent de façon itérative : Ak + 1B = A * AkB.
est nommée la matrice de commandabilité, et ses colonnes se calculent de façon itérative : Ak + 1B = A * AkB.
Dualité commandabilité / observabilité
Il existe un principe de dualité entre la commandabilité et l'observabilité : soient deux dispositifs :

- S est observable si et uniquement si S * est commandable
- S est commandable si et uniquement si S * est observable
- Un dispositif à la fois commandable et observable est dit minimal.
Stabilisabilité
La commandabilité est une propriété structurelle forte du dispositif. Il est fréquemment suffisant d'utiliser la propriété de stabilisabilité. Cette dernière propriété peut se définir de plusieurs façons équivalentes, un dispositif est dit stabilisable ssi :
- Ses pôles non commandables sont stables, i. e. les variables non commandables sont naturellement stables.
- Il existe une commande par retour d'état U (t) = − KX (t) tel que la matrice (A − BK) soit Hurtwitz. C'est une propriété importante, car comme le terme le laisse entrevoir il est impossible de stabiliser un dispositif qui n'est pas stabilisable.
Forme canonique pour la commandabilité
Il est fréquemment intéressant de séparer les variables d'état commandables des autres. Notons χ la partition commandable du vecteur d'état, et ξ le reste du vecteur d'état, non commandable. Le dispositif s'écrit alors :

La forme canonique pour la commandabilité est caractérisée par l'absence des termes A21 et B2 qui sont par conséquent nuls. Sous cette forme, le dispositif est stabilisable ssi la matrice A22 est Hurtwitz.
- (en) Controllability de PlanetMath
Recherche sur Google Images : |
|
"... selectionnable et commandable." L'image ci-contre est extraite du site www.look-business.com Il est possible que cette image soit réduite par rapport à l'originale. Elle est peut-être protégée par des droits d'auteur. Voir l'image en taille réelle (600 x 360 - 40 ko - jpg)Refaire la recherche sur Google Images |
Recherche sur Amazone (livres) : |
Voir la liste des contributeurs.
La version présentée ici à été extraite depuis cette source le 14/04/2009.
Ce texte est disponible sous les termes de la licence de documentation libre GNU (GFDL).
La liste des définitions proposées en tête de page est une sélection parmi les résultats obtenus à l'aide de la commande "define:" de Google.
Cette page fait partie du projet Wikibis.
 Accueil
Accueil Recherche
Recherche Début page
Début page Contact
Contact Imprimer
Imprimer Accessibilité
Accessibilité