Commande par retour d'état
En automatique, la commande par retour d'état est un moyen d'asservir un dispositif dynamique.

Catégories :
Automatique - Robotique
Recherche sur Google Images :

Source image : membres.lycos.fr Cette image est un résultat de recherche de Google Image. Elle est peut-être réduite par rapport à l'originale et/ou protégée par des droits d'auteur. |
Page(s) en rapport avec ce sujet :
- des systèmes à base de composants de l'électronique.... La structure de base d'une commande à retour d'état est .... placement des pôles.... (source : univ-setif)
En automatique, la commande par retour d'état est un moyen d'asservir un dispositif dynamique.
Principe
La commande par retour d'état est une méthode employée en asservissement pour placer les pôles en boucle fermé dans le plan p. L'intérêt de cette technique est que les pôles, correspondant à la valeur propre du dispositif, vont influencer la dynamique du dispositif bouclé.
Avec le dispositif en boucle fermée sous la forme de la représentation d'état,


alors les pôles du dispositif sont les racines de l'équation :

La commande par retour d'état s'opère sur le vecteur entrée  . On a alors une entrée proportionnelle (au sens matriciel) à l'état,
. On a alors une entrée proportionnelle (au sens matriciel) à l'état,
 .
.
Ceci replacé dans les équations au dessus donne,


Les racines du dispositif asservi sont données par l'équation, ![\det\left[p\textbf{I}-\left(\textbf{A}-\textbf{B}\textbf{K}\right)\right]](illustrations/70c10919dc18b0e65fad38ac8d106dfd.png) . Ce terme doit être identiqueé à celui du polynôme caractéristique de l'asservissement désiré. On obtient alors les valeurs de la matrice de retour
. Ce terme doit être identiqueé à celui du polynôme caractéristique de l'asservissement désiré. On obtient alors les valeurs de la matrice de retour  qui va forcer les valeurs propres en boucle fermée à l'endroit spécifié par le polynôme caractéristique de l'asservissement.
qui va forcer les valeurs propres en boucle fermée à l'endroit spécifié par le polynôme caractéristique de l'asservissement.
Exemple
On considère un dispositif décrit de la façon suivante :
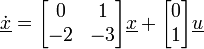
En boucle ouverte, le dispositif a pour pôle p = − 1 et p = − 2. On suppose qu'on souhaite que le dispositif asservi ait des valeurs propres situées à p = − 1 et p = − 5. Le polynôme caractéristique est par conséquent p2 + 6p + 5 = 0.
En suivant la méthode indiquée auparavant,  , et on a ainsi l'équation
, et on a ainsi l'équation
 .
.
La résolution donne alors
 .
.
Donc, fixer va positionner les pôles en boucle fermée à l'endroit désiré, donnant au dispositif de commande les performances voulues.
Remarques
Ceci fonctionne seulement pour les dispositifs à une entrée car les dispositifs à plusieurs entrées n'ont pas une matrice K unique. le choix des meilleurs valeurs de K n'est pas trivial. On peut alors utiliser la régulation linéaire quadratique.
Recherche sur Amazone (livres) : |
Voir la liste des contributeurs.
La version présentée ici à été extraite depuis cette source le 14/04/2009.
Ce texte est disponible sous les termes de la licence de documentation libre GNU (GFDL).
La liste des définitions proposées en tête de page est une sélection parmi les résultats obtenus à l'aide de la commande "define:" de Google.
Cette page fait partie du projet Wikibis.
 Accueil
Accueil Recherche
Recherche Début page
Début page Contact
Contact Imprimer
Imprimer Accessibilité
Accessibilité